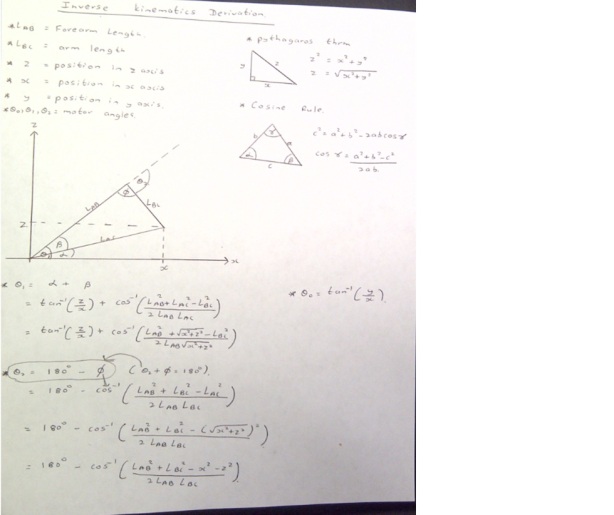
The Inverse Kinematics Derivation was performed by using basic Geometry and Trigonometry In particular the Cosine Rule and Pythagorean theorem was used in determining the different motor angles
———–
ED & AJ
The Inverse Kinematics Derivation was performed by using basic Geometry and Trigonometry In particular the Cosine Rule and Pythagorean theorem was used in determining the different motor angles
———–
ED & AJ
Image
—
Posted: February 15, 2013 by evan007d in Photo
Tags: inverse kinematics, robot arm
—-
DK
Image
—
Posted: February 4, 2013 by dkapoor123 in Photo
Tags: drawing, led, lighting, rig, webcam
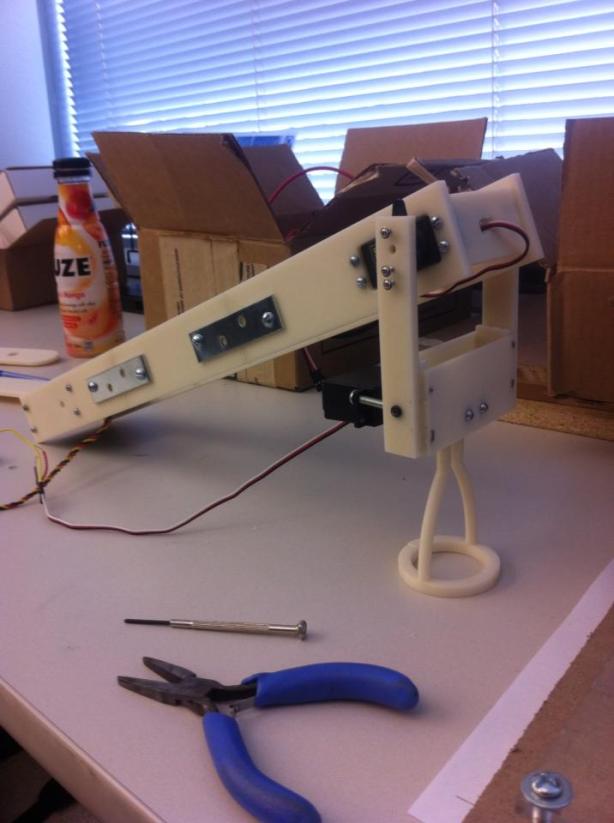
Gripper and forearm are almost complete. The 3D-printed pieces have been put together and the motors are in place.
Only wiring left to go to finish the upper arm…
————-
MG & DK
Image
—
Posted: January 29, 2013 by MG in Photo
Tags: 3d printing, arm, motors, robot, robot arm
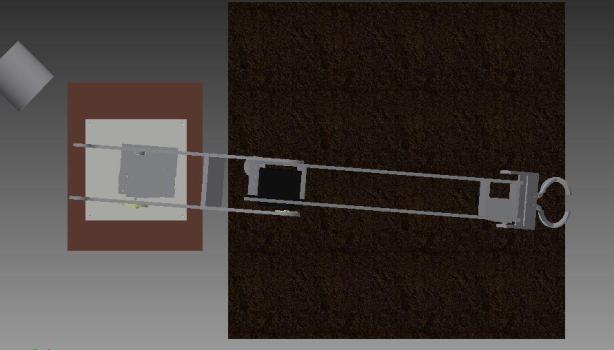
Finally got the image processing algorithm up-to-snuff so it can detect the chess pieces accurately!
In this demo we’re placing 3 pawns from each side and seeing the software react to moves made.
—-
MG
Video
—
Posted: January 24, 2013 by MG in Videos
Tags: chess, template matching, tracking, video

Chiara robot
The Chiara robot has the same gripper design as ours.
I guess great minds think alike… 😛
—-
MG
Image
—
Posted: January 3, 2013 by MG in General, Photo
Tags: chess, competition, gripper, robot, robot chess
This is the PowerPoint presentation we gave at the end of the first 3 months of research and development:
The demo video on Slide 14 is:
The demo video on Slide 21 is:
Enjoy!
————–
MG & DK
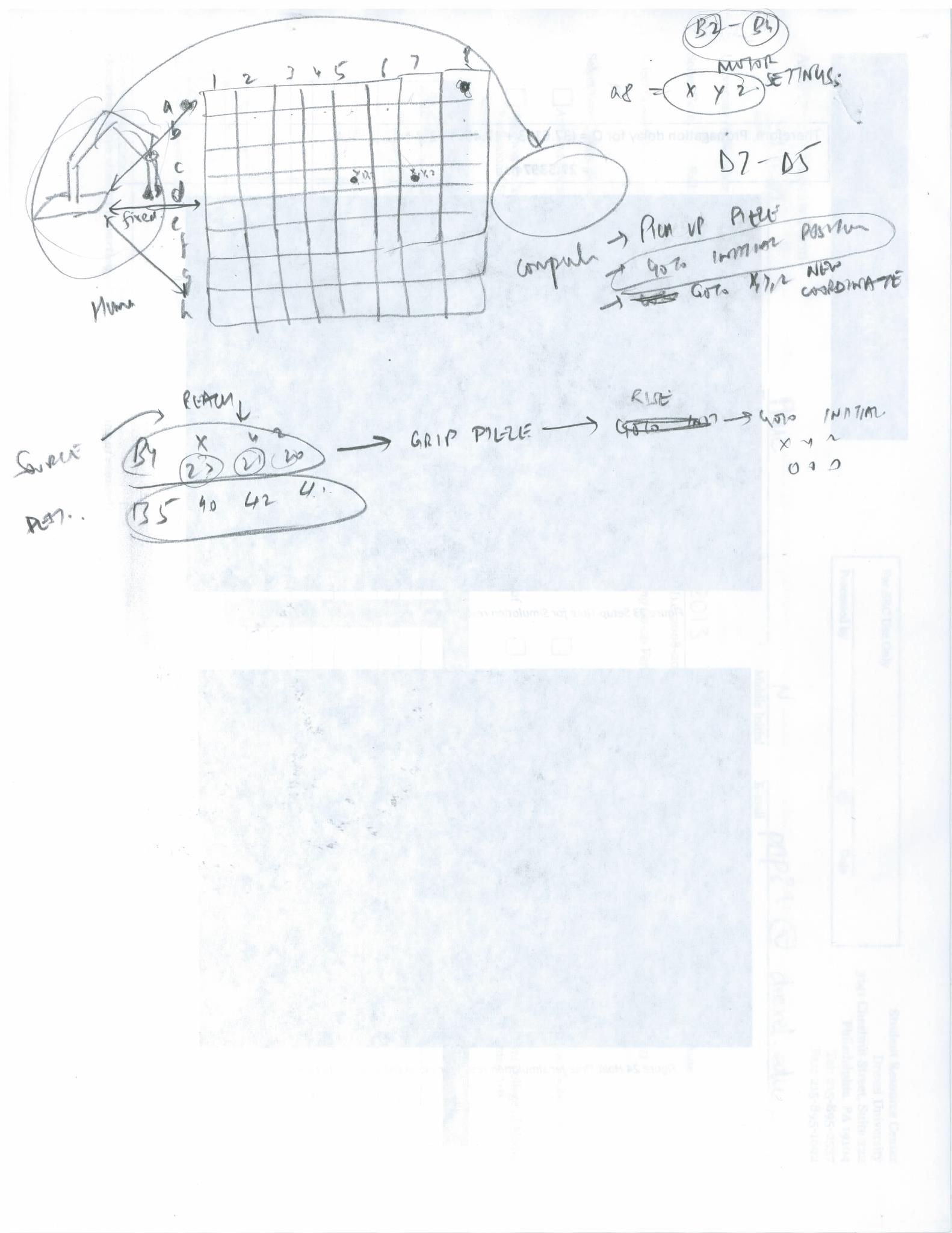
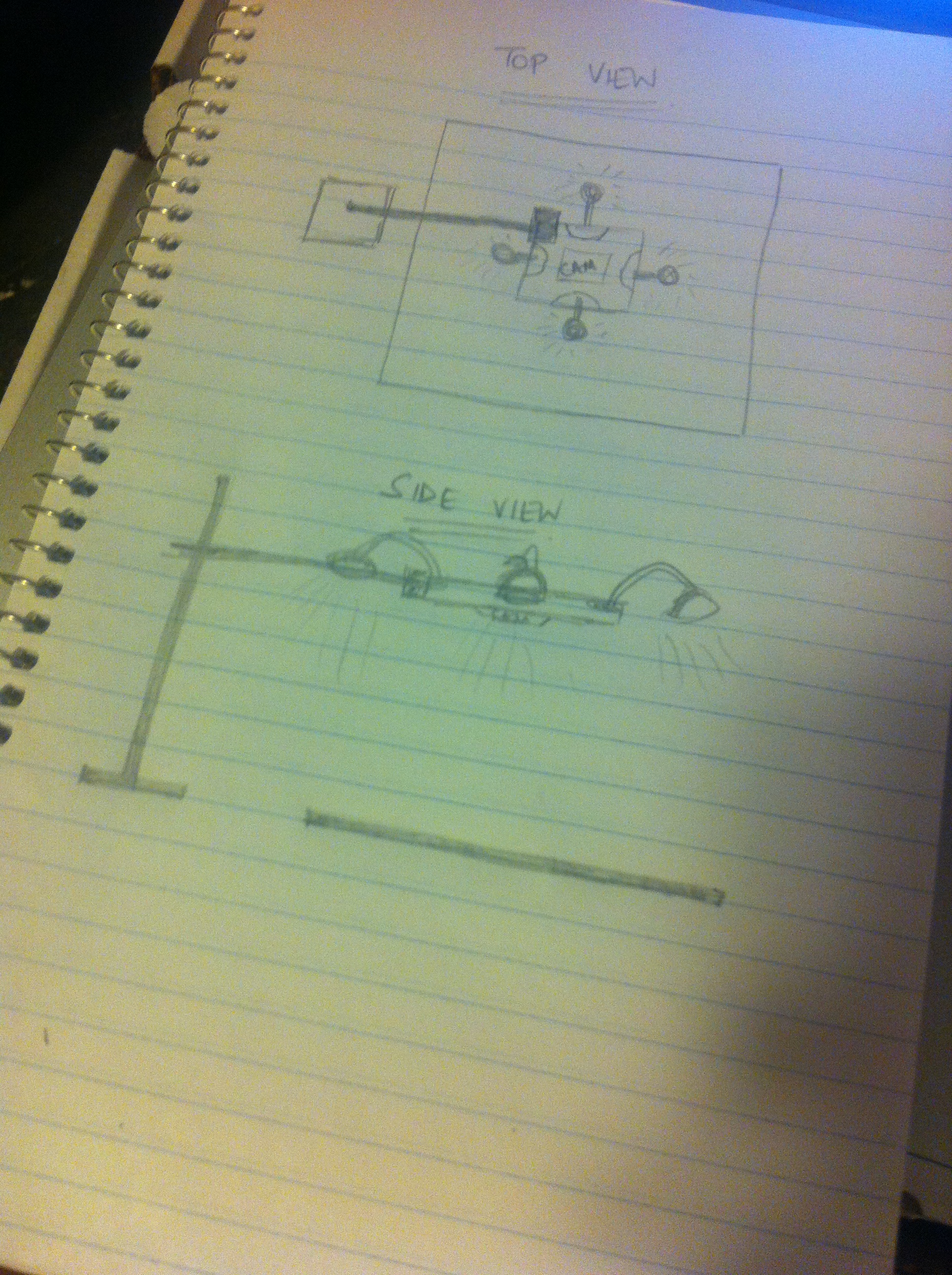
Scribbles for Robot Arm implementation in Winter
—-
DK
Image
—
Posted: November 27, 2012 by MG in General, Photo
Tags: software design, wiremap
Integration of Chess AI and chess single piece tracker. The graphical representation of the board shows the current state of the chess board after each move. Also, displays the move made by the human and the AI in the cell name format.
Peaceeeee outttt! 🙂
—-
DK
Video
—
Posted: November 27, 2012 by MG in General
Tags: chess, demo, software, tracking, video

Quad Chart (Click to embiggen)
————
AJ & MG