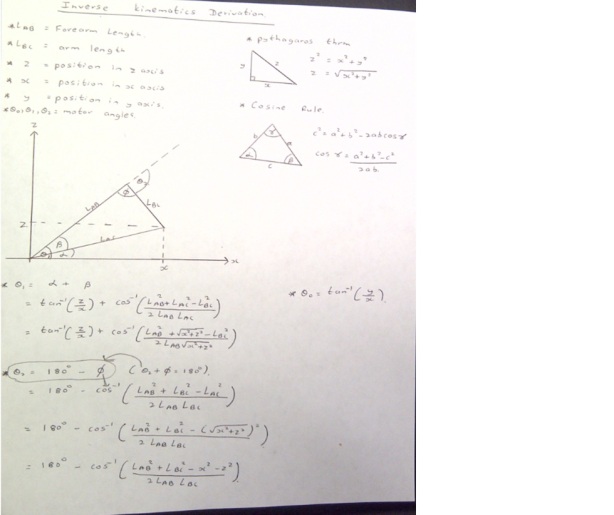
The Inverse Kinematics Derivation was performed by using basic Geometry and Trigonometry In particular the Cosine Rule and Pythagorean theorem was used in determining the different motor angles
———–
ED & AJ
The Inverse Kinematics Derivation was performed by using basic Geometry and Trigonometry In particular the Cosine Rule and Pythagorean theorem was used in determining the different motor angles
———–
ED & AJ
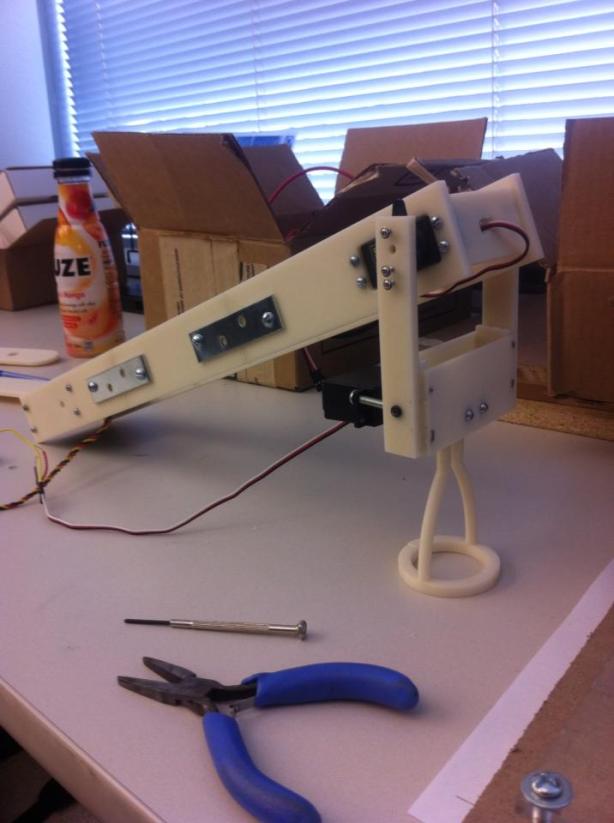
Gripper and forearm are almost complete. The 3D-printed pieces have been put together and the motors are in place.
Only wiring left to go to finish the upper arm…
————-
MG & DK



This is a blog created to chronicle the development of the “Human-Robot Chess” project. This is a Senior Design research project being worked on by 4 engineers at Drexel University and their adviser:
The purpose of this project is to build a robot arm that can autonomously play chess against a human opponent. This requires the construction of a mechanical arm, an image processing software and a chess algorithm. The project will use a Microsoft Kinect Sensor as the visual input. The sensor will be used to identify the current state of a chess board, pass this information to an AI chess program, and command a robotic-arm to move the chess pieces.
Our final objectives are:
In the following months, we will regularly update this blog with our progress.
————————
MG, DK, AJ & ED