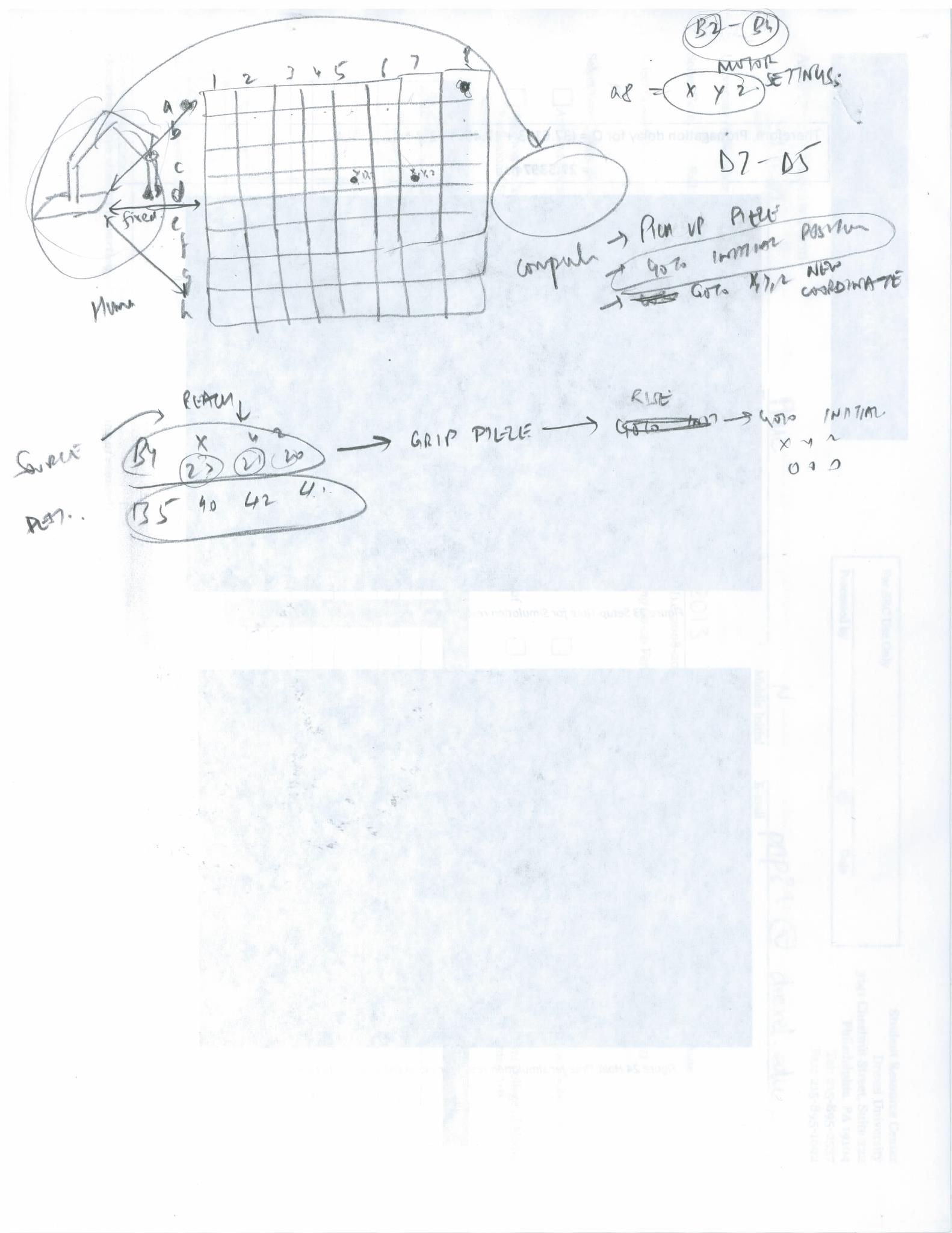
Scribbles for Robot Arm implementation in Winter
—-
DK
Scribbles for Robot Arm implementation in Winter
—-
DK
Integration of Chess AI and chess single piece tracker. The graphical representation of the board shows the current state of the chess board after each move. Also, displays the move made by the human and the AI in the cell name format.
Peaceeeee outttt! 🙂
—-
DK

Quad Chart (Click to embiggen)
————
AJ & MG



Starting from a blank chessboard, initializing the Chess grid with 0’s (empty squares). After adding Queen, it is recognized and the square value is changed to 1.
The square value changes when the Queen is moved to a new square. The new occupied square now has 1 as the value, implying the square is filled. Also, in the console window, the move made by piece is shown as b2 to b4. For the second test, the queen is moved again to a new position and now the console displays the move b4 to d2.
NOTE:
1) Image processing is very sensitive to light and brightness. Having a vinyl chessboard (highly reflective) makes it more tough to see pieces on the board and get an accurate read.
2) Reading a black piece on a black square and white piece on a white square is dependent on the lighting. (threshold changes due to lighting and is still being worked on)
——
DK
Test Successful under dim lighting
—-
DK
Black on black hard to read.
—-
DK