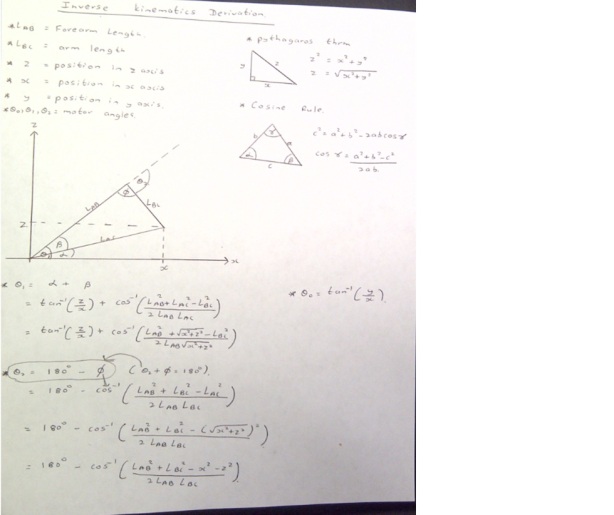
The Inverse Kinematics Derivation was performed by using basic Geometry and Trigonometry In particular the Cosine Rule and Pythagorean theorem was used in determining the different motor angles
———–
ED & AJ
The Inverse Kinematics Derivation was performed by using basic Geometry and Trigonometry In particular the Cosine Rule and Pythagorean theorem was used in determining the different motor angles
———–
ED & AJ