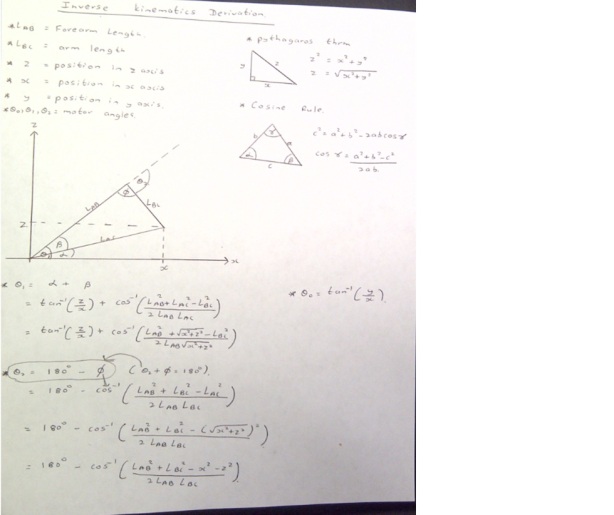
The Inverse Kinematics Derivation was performed by using basic Geometry and Trigonometry In particular the Cosine Rule and Pythagorean theorem was used in determining the different motor angles
———–
ED & AJ
The Inverse Kinematics Derivation was performed by using basic Geometry and Trigonometry In particular the Cosine Rule and Pythagorean theorem was used in determining the different motor angles
———–
ED & AJ
—-
DK
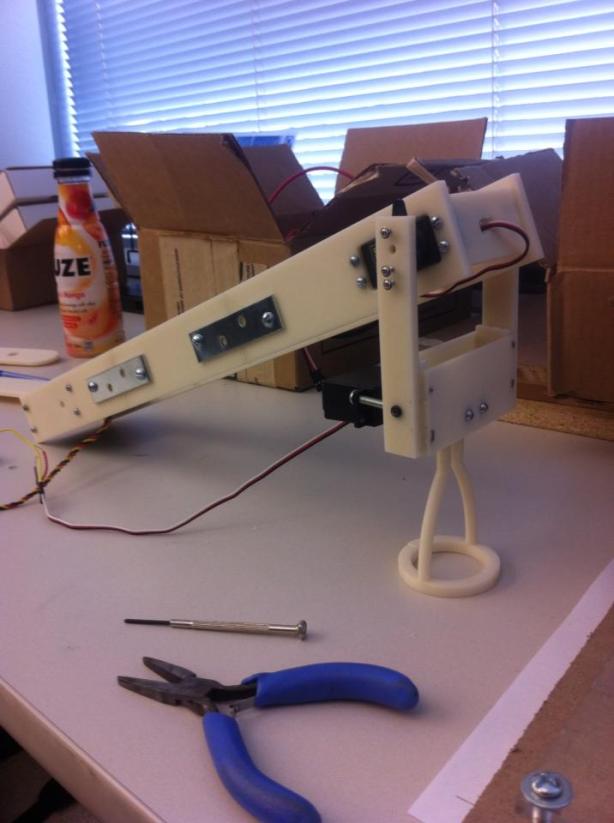
Gripper and forearm are almost complete. The 3D-printed pieces have been put together and the motors are in place.
Only wiring left to go to finish the upper arm…
————-
MG & DK

Chiara robot
The Chiara robot has the same gripper design as ours.
I guess great minds think alike… 😛
—-
MG
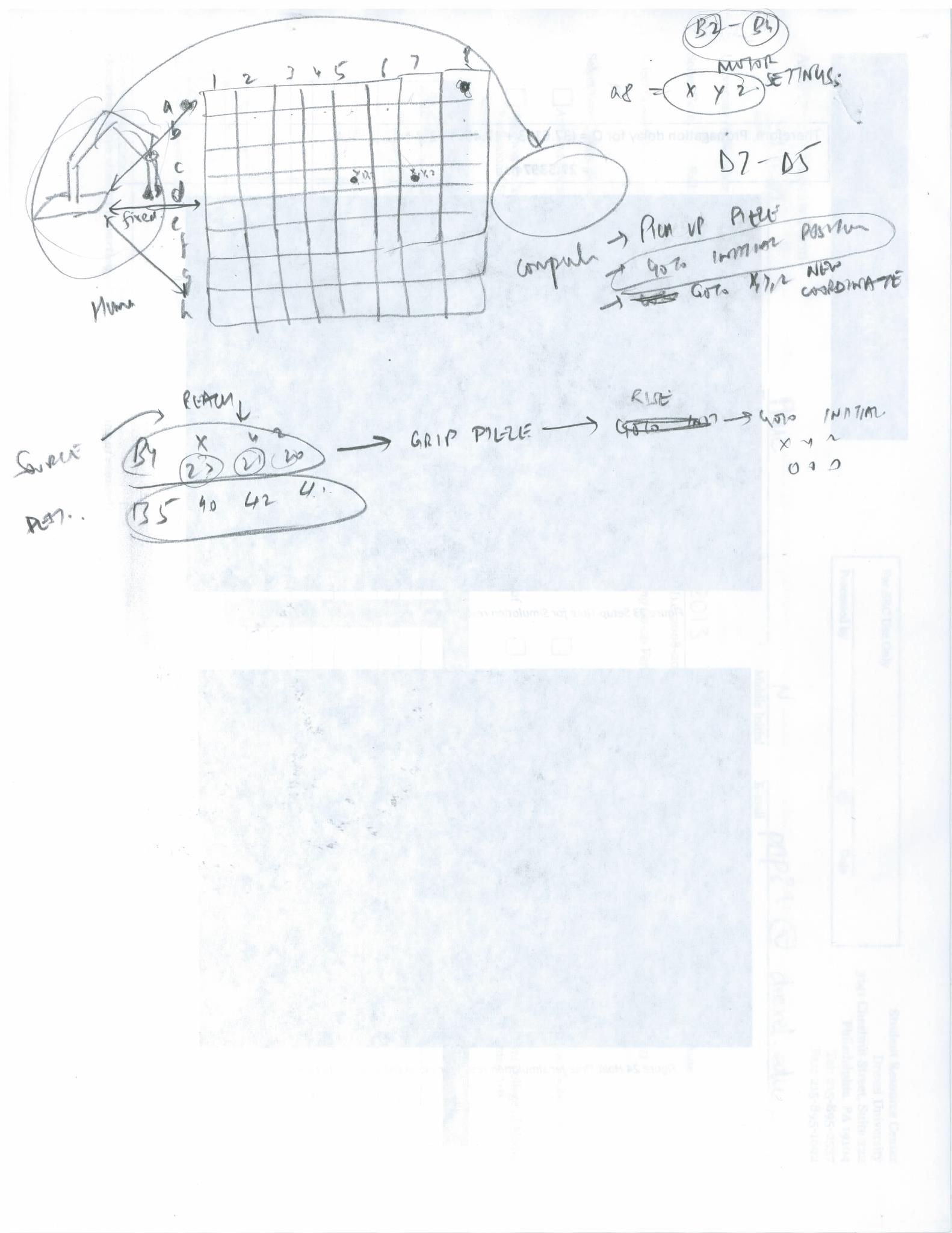
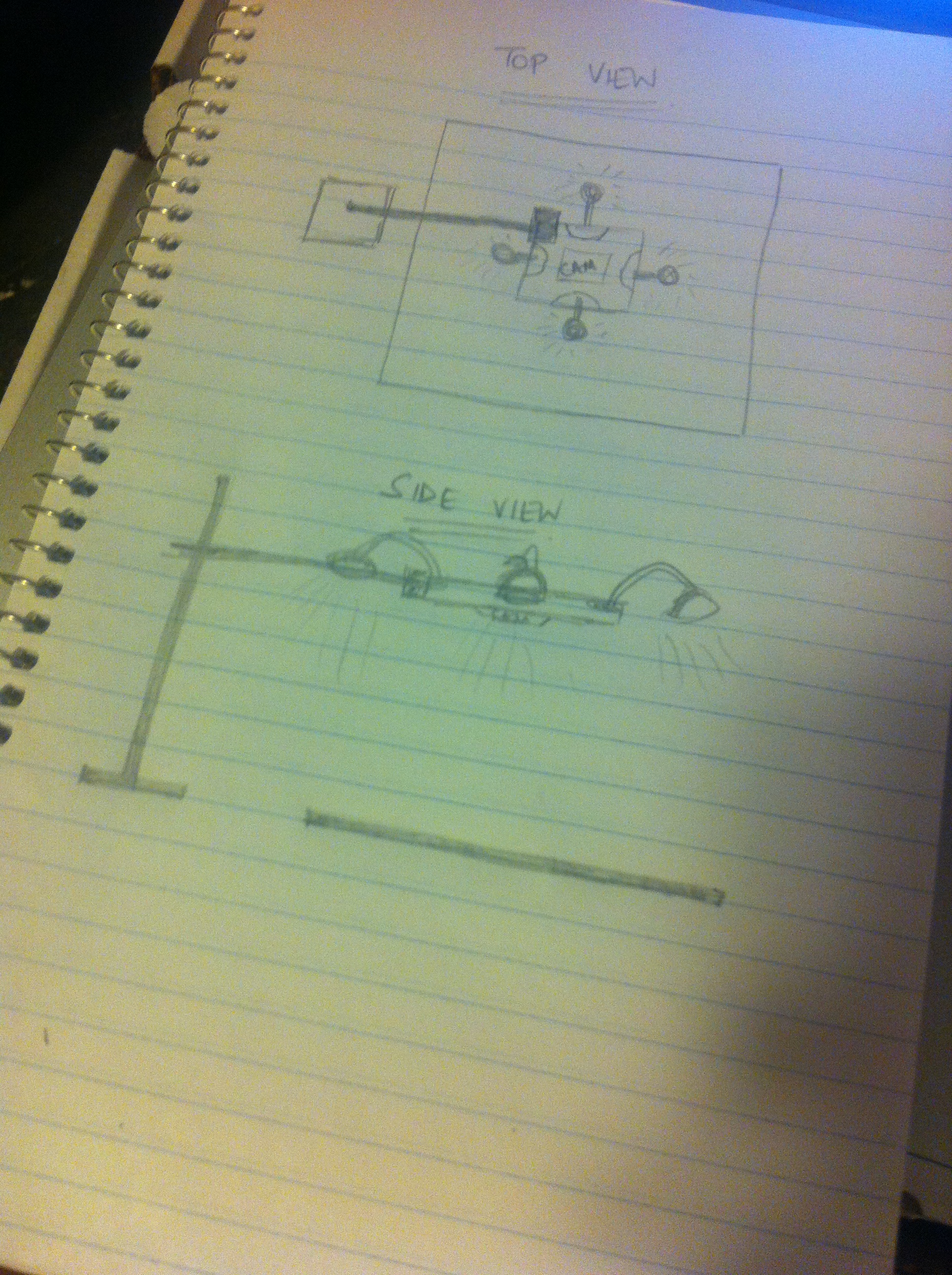
Scribbles for Robot Arm implementation in Winter
—-
DK